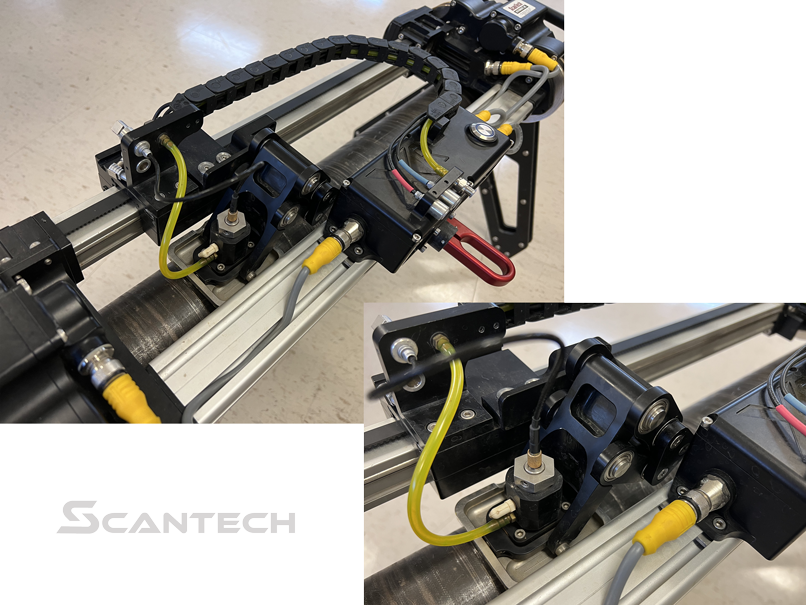
Proven Results with ScanTech’s Proprietary Spring Mechanisms
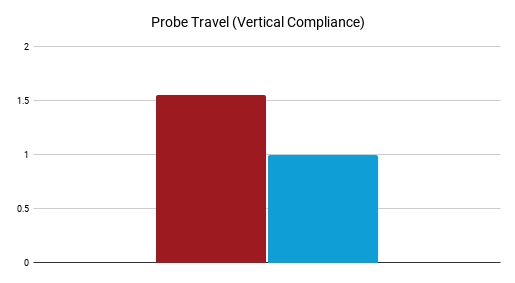
We conducted extensive tests comparing the performance of our XR probe mechanism with a leading competitor.

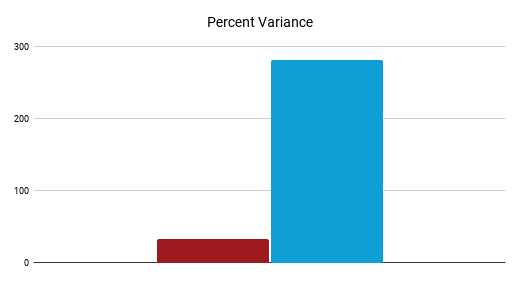
The results speak for themselves:
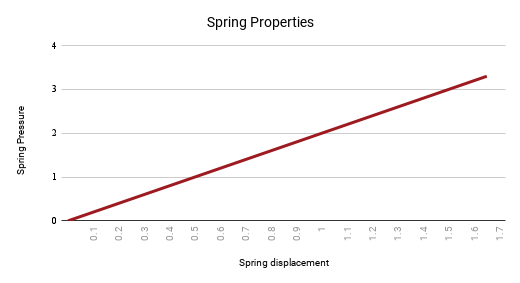
- Reduced Pressure Variance: Our mechanisms showed significantly lower variance in contact pressure, meaning a more stable signal and fewer data errors.
- Enhanced Durability: By designing within the elastic limits of our spring materials, we reduce wear, ensuring long-term performance.
These advancements in spring tension technology provide a tangible improvement in data reliability, even on challenging surfaces.